Terminatore di volo
Attualmente i droni hanno spopolato sul mercato e se ne trovano di tutti tipi e con qualsiasi prezzo. Ci sono poi tante norme dietro il loro utilizzo, per fortuna non coinvolgono chi lo fa a scopo ricreativo come un modellista.. Queste macchine hanno una tecnologia avanzata, se pensiamo che chi faceva volare elicotteri aveva al massimo un giroscopio per il servo di coda, mentre ora in questi modelli abbiamo tre gyro con accelerometri ecc. il tutto con una buona precisione ed a un buon prezzo. Tutti questi sensori uniti ad un microprocessore, sono in grado di stabilizzare il modello e/o farlo volare autonomamente, ma visto che i programmi non sono infallibili e che possono sempre verificarsi guasti o errori su sistemi di orientamento, qualche sicurezza in più non guasta mai.
Per chi come me vorrebbe certificare il proprio drone per l'utilizzo in aree non critiche è quasi indispensabile un sistema di sicurezza che, nel caso il mezzo sia fuori controllo e non ritorni al punto di decollo, possa interrompere la missione facendo la cosa più semplice.. "Staccare la spina"
Beh, ovviamente questo deve essere fatto in casi estremi e su un'area libera da persone (detta aerea di buffer), ancora meglio se il drone è dotato di paracadute per non distruggerlo insieme alla sua eventuale attrezzatura.
Il funzionamento del sistema è semplice, si basa su un trasmettitore e ricevitore RF con due servi, uno per il controllo del paracadute ed un altro per lo spegnimento dei motori. Tramite Arduino invieremo un segnale ppm al trasmettitore che controllerà i servi sul ricevitore attivandoli su nostra richiesta.
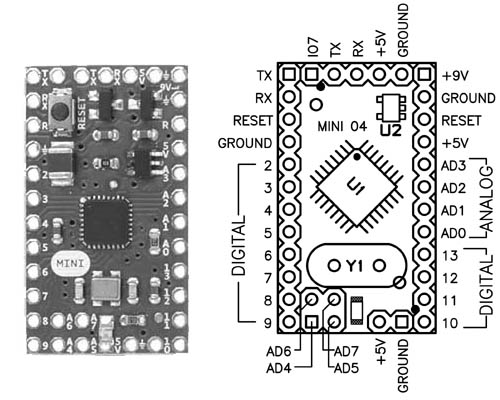
Vediamo nel dettaglio e partiamo dal sistema di controllo, ovvero Arduino mini (v.5):
Circuito di controllo
Come descritto, il compito principale è quello di generare un segnale ppm per comandare i servi sul ricevitore. Per avere una maggior sicurezza ho pensato di inserire un interruttore a chiave con il quale "armare" il dispositivo per evitare attivazioni accidentali ed un pulsate o switch per l'attivazione del dispositivo (premuto per almeno 250ms). Questo è lo schema del collegamento switch e led ad Arduino e della connessione con il trasmettitore
Le connessioni sono semplici, resistenze da 10k e condensatori 100nF per tenere i pin di ingresso a livello basso e evitare rimbalzi. Il pin 9 settato come uscita è utilizzato per generare il segnale ppm a 8ch (modificabile da programma). Lo switch2 (sotto chiave) è connesso al pin3 e abilita il sistema, questo viene segnalato dall'accensione del led "armato", mentre lo switch1 collegato al pin2 attiva il sistema. Le tensioni sono 5V per Arduino e 12V per il trasmettitore. Di seguito il programma da caricare su Arduino, è possibile configurare il numero dei canali, i pin da utilizzare, i canali dove collegheremo i servi e modificare i tempi di intervento/attivazione paracadute.
Funzionamento:
All'accensione il programma controlla che i livelli degli switch siano bassi, altrimenti entra in modalità blocco ed impedisce di attivare il sistema, stessa cosa succede se si tiene premuto prima il pulsante di attivazione mentre l'interruttore di abilitazione è spento.
Nel caso ci sia un blocco occorre mettere a riposo entrambi gli switch, poi si può procedere attivando prima lo switch2 (abilitazione).
Se il sistema è pronto per l'attivazione (nessun blocco) viene acceso il led (denominato "armed" al pin 4).
Una volta che il sistema è armato, occorre un impulso di 250ms sul pin 2 (pulsante o switch di attivazione) per far partire il sistema di sgancio, il quale prima attiva un servo sul canale 2 per l'apertura di un paracadute e dopo 0,5sec spegne i motori staccando la spina tramite il servo sul canale 1.
I tempi possono essere modificati a piacere cambiando i valori sul programma.
Componenti: (per la parte di controllo)
Arduino mini (nell'esempio versione 05)
R1=R2=10kΩ
R3=470Ω
C1=C2=100nF
Led= led rosso
Sw1=pulsante o switch a leva
Sw2=interruttore a chiave
Per la parte trasmissione e ricezione si possono usare diverse soluzioni in base alla frequenza di trasmissione scelta. Questi sono due trasmettitori economici che accettano un segnale ppm uno a 2,4Ghz e l'altro 433Mhz.

Nel mio progetto ho utilizzato la versione a 433Mhz e gli ho caricato il firmware openLRS per avere più funzioni e per utilizzare una frequenza diversa dal radiocomando. In Italia non si può utilizzare la frequenza 433 sopra i 10mW se non si ha il patentino.. ma con il firmware openLRS si può settare la potenza di trasmissione e quindi l'ho ridotta. Per chi fosse interessato alla soluzione openLRS, occorre avere un adattatore seriale-usb che funzioni con livelli logici a 3,3V, altrimenti non si potrà riprogrammare il trasmettitore (e ricevitore), anzi con un adattatore a 5V lo brucerete.
Per semplificarvi la vita, esiste una app su Chrome per riprogrammare il tx/rx con il suddetto firmware:
https://chrome.google.com/webstore/detail/openlrsng-configurator/focgpgmpinbadijfcdimbdkgnpndjnkl
(Se si aggiorna il trasmettitore, occorre farlo anche con il ricevitore e rieseguire il binding)
https://github.com/openLRSng/openLRSng/wiki
(tutte le informazioni su questo firmware)
Come ricevitore ho utilizzato un Orange 433Mhz, ma se si sceglie di utilizzare il modulo TX a 2,4Ghz mostrato sopra, si può utilizzare un qualsiasi ricevitore DSM2/DSMX (della Spektrum o compatibile).

Nel ricevitore basta collegare i servi ai canali prestabiliti ed il sistema è pronto.
I componenti TX e RX ed eventuali servocomandi si possono acquistare in negozi di modellismo oppure online.
Componenti: (per la parte di trasmissione e ricezione, da variare in base al sistema e frequenza utilizzata)
Trasmettitore Orange openLRS 100mw 433Mhz HK
Ricevitore Orange openLRS 433Mhz HK
servo 9g per apertura paracadute (se lo avete o se già incluso nel sistema)
servo da 6kg/cm per distacco della spina
N.2 spinotti XT90 (o altro connettore in base all'assorbimento)
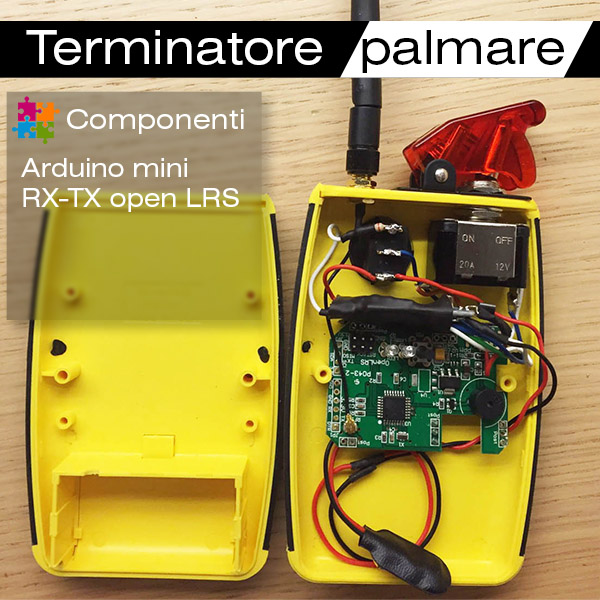
Di seguito alcune immagini del sistema realizzato:
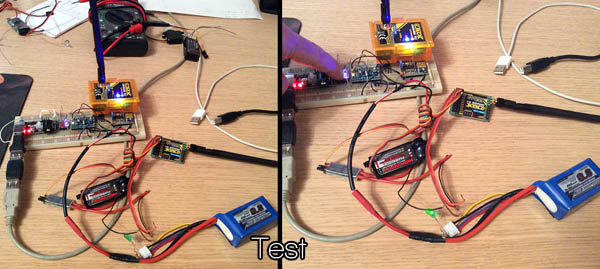
Tutto installato in una ground station.


Per la parte di distacco dell'alimentazione, molto varia dall'assorbimento del sistema, un semplice metodo utile fino a 90A può essere costruito con due spinotti xt90 come mostrato nello schema, con assorbimenti minori si può pensare di usare gli xt60 oppure i T connector.

Il servo va collegato con un cavo o fascetta in modo da tirare il connettore che chiude il circuito, in base al tipo di connettore usato occorre un servo di adeguata forza, su un xt90 occorre un servo da 6-7Kg/cm.
Download: